Zastosowanie systemów CAD i RP w projektowaniu i prototypowaniu rotomatu
Opracowanie założeń konstrukcyjnych
Zasadniczo w konstrukcji projektowanego urządzenia wyróżniono dwa elementy: układ napędowy oraz układ kinematyczny odpowiedzialny za przemieszczanie zegarka w założony sposób.
Przyjęto zastosowanie do napędu rotomatu silniczka prądu stałego zasilanego napięciem 5 V, dzięki czemu uzyskano możliwość zasilania urządzenia z gniazda USB, z gniazda w komputerze lub powszechnie stosowanymi ładowarkami, np. do telefonów komórkowych. Silniki tego typu charakteryzują się wysoką prędkością obrotową, zaś rotomat porusza się z prędkością maksymalnie kilku obrotów na minutę. Z tego też względu konieczne było zastosowanie w układzie napędowym przekładni o dużym przełożeniu. Z Jedną z takich technik jest druk 3D, który umożliwia wytwarzanie trójwymiarowych modeli. Dzięki tej metodzie możliwe jest tworzenie wyrobów o skomplikowanych kształtach oraz wysokiej dokładności, które są trudne lub niemożliwe do uzyskania za pomocą tradycyjnych metod.
Głównym założeniem techniki przyrostowej jest tworzenie prototypów, co pozwala na łatwiejsze i szybsze doskonalenie produktu. Ze względu na szerokie zastosowanie druku 3D jest on wykorzystywany w różnych branżach. W niniejszym artykule na przykładzie projektu rotomatu przedstawiono praktyczne możliwości, jakie daje połączenie współczesnych systemów CAD i RP.
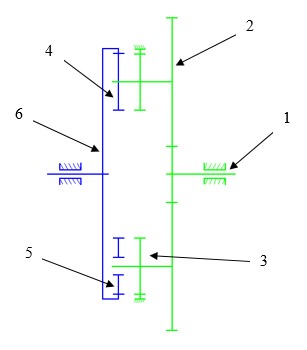
W układzie napędowym zastosowano połączenie przekładni planetarnej z dwoma satelitami osadzonymi na wspólnym wałku (rys. 1 – kolor zielony) oraz dodatkowej przekładni z kołem zębatym o uzębieniu wewnętrznym (rys. 1 – kolor niebieski). Zastosowanie dwustopniowych satelitów umożliwia uzyskanie zmniejszenia wymiarów przy zachowaniu przełożenia. Poprzez zastosowanie przekładni o zazębieniu wewnętrznym napędzanej przez satelitę przy różnicy zębów koła centralnego uzębionego wewnętrznie i koła uzębionego wewnętrznie przekładni walcowej wynoszącej 1 uzyskano ruch względny tych kół dający przełożenie równe liczbie zębów koła uzębionego wewnętrznie.
Na rys. 1 można zobaczyć, że napęd z silnika przekazywany jest na koło centralne zewnętrznie uzębione (1), które wprawia w ruch koła obiegowe (2) wraz z jarzmem, w którym są osadzone. Koła obiegowe (3) współpracujące z kołem centralnym wewnętrznie uzębionym unieruchomiono i połączono z kołami (2). Połączenie z dodatkową przekładnią zrealizowano poprzez koła obiegowe obu przekładni współpracujących z kołami centralnymi wewnętrznie uzębionymi. Satelitę (4) połączono sztywno z kołem obiegowym (3). Drugą satelitę (5) ułożyskowano (na wałku koła – 3), co umożliwia jej swobodny obrót.
W efekcie, gdy jarzmo wykona pełny obrót, różnica w liczbie zębów pomiędzy kołami wewnętrznie uzębionymi powoduje przemieszczenie o 1 ząb. Dzięki przyjętemu rozwiązaniu uzyskano łączne przełożenie przekładni wynoszące 981,5.
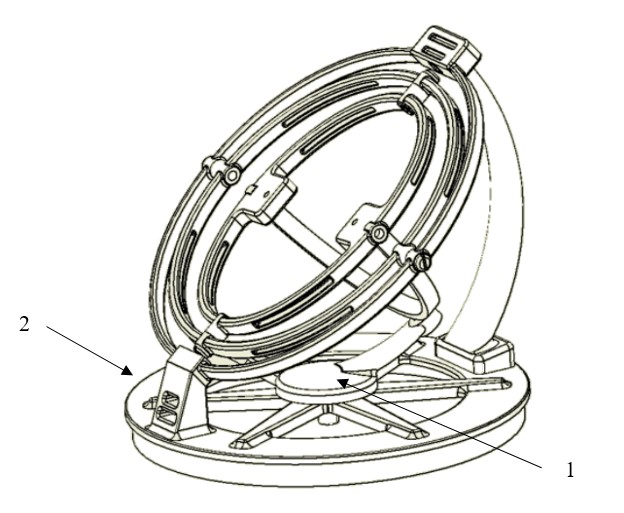
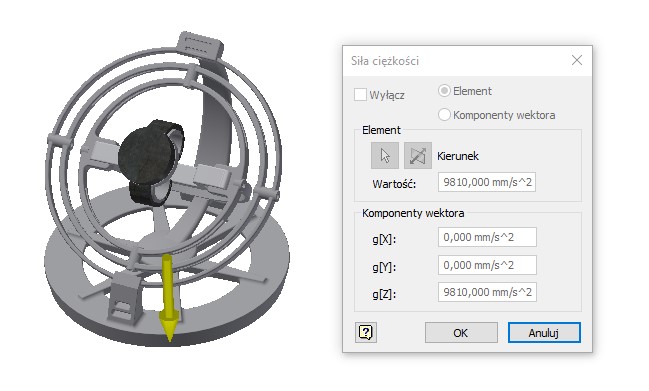
Układ kinematyczny rotomatu zaprojektowano, przyjmując układ żyroskopowy (rys. 2). Na moduł żyroskopowy składają się trzy obręcze o proporcjonalnych średnicach, które połączone są osiowo względem siebie. Zastosowana konstrukcja pozwala na obrót obręczy w trzech osiach, dzięki czemu osiągnięto dobre odwzorowanie ruchu ręki.
Podstawę rotomatu podzielono na dwie części: zewnętrzną stanowiącą obudowę modułu napędowego oraz wewnętrzną łączącą moduł napędowy z obręczami. Do górnej części obudowy zamocowano największą z obręczy, tak aby była nieruchoma. Dodatkowo zastosowano element wspierający w celu wzmocnienia całej konstrukcji żyroskopowej. Wewnętrzną obręcz, na której umieszczany jest zegarek, połączono z dźwignią, która przekazuje napęd. W związku z osiowym połączeniem obręczy wprawiona w ruch wewnętrzna obręcz powoduje ruch obrotowy obręczy środkowej.
Galeria







Co tydzień otrzymaj od nas porządną dawkę wiedzy o branży przemysłowej!