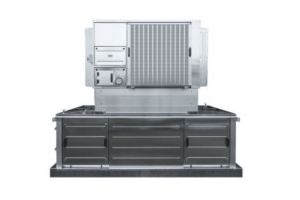
Manipulator monolityczny wykonujący mikroruchy
Prace konstrukcyjne manipulatora zaczynają się od klasycznego schematu z przegubami obrotowymi. Analiza pracy takiego modelu służy do potwierdzenia pomysłu struktury mechanizmu i sprawdzenia założonej redukcji ruchów i ich złożenia na platformie roboczej. Na tym etapie decyduje się o gabarytach i dalszym kształcie wersji monolitycznej. Dokładniejsze wyniki uzyskuje się poprzez badania przy użyciu metody elementów skończonych pokazujące wartości naprężeń i przemieszczeń. W ramach projektu ze stali o grubości 6 mm wykonano manipulator realizujący przemieszczenie punktu Q w zakresie 10 mikrometrów w każdym kierunku ruchu (rys. 1b). Operator manipulatora przy użyciu mikroskopu obserwuje na monitorze narzędzie i za pomocą joysticka steruje jego ruchem. Przeprowadzone badania wykazały płynność i powtarzalność ruchu końcówki narzędzia.
Planuje się rozwój konstrukcji manipulatora zmierzający do budowy urządzenia wykonującego trzy prostopadłe do siebie przemieszczenia liniowe. Rozpatrywana jest również konstrukcja manipulatora do mikroruchów wykonującego kilkudziesięciostopniowy obrót, co znacznie zwiększy jego manipulacyjność.
Politechnika Krakowska
Wydział Mechaniczny
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych
31-864 Kraków, Al. Jana Pawła II 37
dr [...]

Mogą zainteresować Cię również




Co tydzień otrzymaj od nas porządną dawkę wiedzy o branży przemysłowej!