Autonomiczny transport w przemyśle 4.0
Hierarchia sterowania
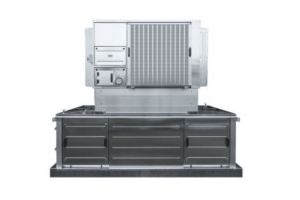
AGV cechuje się zazwyczaj stałą trasą przejazdu, wzdłuż ustalonej ścieżki. Warunki działania są przewidywalne, co oznacza stosunkowo niewielką liczbę parametrów do monitorowania i regulacji. Zawiadywanie robotem nie jest więc mocno skomplikowane, nie pochłania dużej mocy obliczeniowej i nie wymaga w większości przypadków reakcji w czasie rzeczywistym. Komendy sterujące, niosące informacje o potrzebie wykonania danej czynności, pochodzą bezpośrednio z nadrzędnego sterownika, np. PLC umieszczonego w centralnej skrzynce przyłączeniowej. Wewnątrz samego wózka (decentralnie) odbywa się generowanie sygnałów trafiających bezpośrednio do napędów, by zrealizować otrzymane odgórnie zadania, np. przez odpowiednie ukształtowanie prądu trójfazowego. Również aparaturę bezpieczeństwa, odpowiadająca m.in. za awaryjne zatrzymanie, umieszczono jak najbliżej układów wykonawczych.
W przypadku AMR sterowanie jest dużo bardziej problematyczne. Wiele danych musi być na bieżąco analizowanych, by optymalizować działanie pojazdu. Stosowane algorytmy to już rozwiązania z obszaru sztucznej inteligencji. Charakterystyka tego typu maszyn przekłada się na duże pole decyzji możliwych do podjęcia w określonych sytuacjach. Zadania obliczeniowe są rozpraszane wewnątrz robota na różne jednostki, by [...]



Co tydzień otrzymaj od nas porządną dawkę wiedzy o branży przemysłowej!