Autonomiczne wózki jezdniowe AGV. Część I
Rodzaje nawigacji
Znaczący rozwój i zróżnicowanie technik nawigacyjnych wpłynęły na budowę omawianych urządzeń.
Pętla indukcyjna
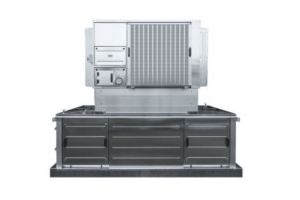
Wózki z nawigacją z zastosowaniem pętli indukcyjnej przemieszczają się dzięki zatopionym w posadzce hali przewodom (kablom), przez które płynie prąd elektryczny o określonej częstotliwości.
Wytworzone pole magnetyczne jest wykrywane przez sensory magnetyczne znajdujące się na wózku. Dokonując ciągłego pomiaru natężenia pola magnetycznego, wózek porusza się w takim kierunku, aby wartość natężenia była cały czas jak największa. Urządzenia te wykorzystują więc nawigację indukcyjną. Ten sposób nawigacji powoduje jednak, że każda zmiana trasy wymaga przeprowadzenia kosztownych i czasochłonnych prac budowlanych. W przypadku tej metody możliwe jest wydłużenie czasu pracy urządzenia poprzez wykorzystanie indukcji do ładowania pojazdu.
Dalszy rozwój nawigacji wózków autonomicznych nastąpił dzięki zastosowaniu naklejanych na posadzkę taśm ferromagnetycznych. Czujniki magnetyczne umieszczone na wózku przekazują odpowiednie sygnały do jednostki sterującej pojazdu. Metoda ta pozwala na rozwijanie większych [...]



Co tydzień otrzymaj od nas porządną dawkę wiedzy o branży przemysłowej!